L298N Driver
The L298N Motor Driver Module is a high-power dual H-bridge driver board designed to control DC motors, stepper motors, and inductive loads using microcontrollers such as Arduino, ESP32, STM32, or Raspberry Pi.
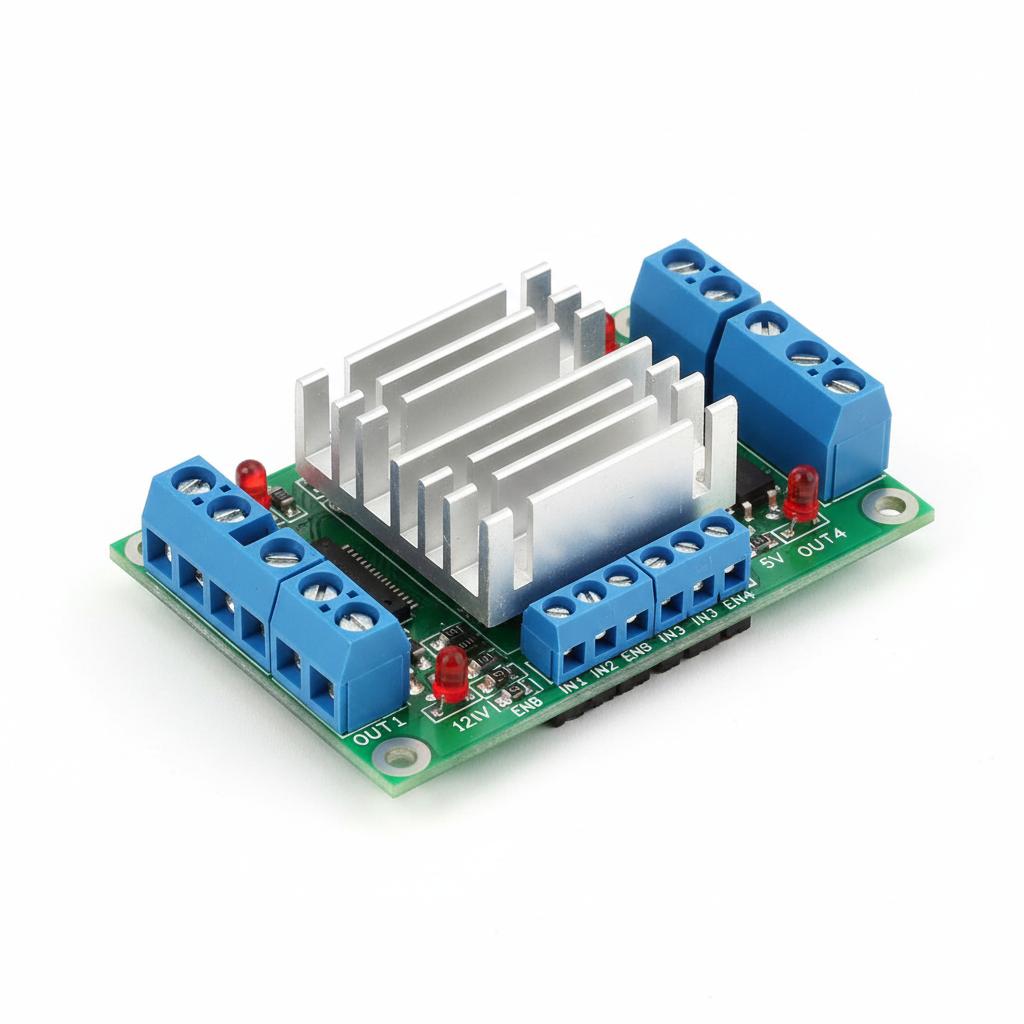
L298N Dual H-Bridge Motor Driver Module
The L298N Motor Driver Module is a high-power dual H-bridge driver board designed to control DC motors, stepper motors, and inductive loads using microcontrollers such as Arduino, ESP32, STM32, or Raspberry Pi.
It allows independent control of two DC motors with adjustable speed and direction by using PWM and digital signals. The onboard L298N IC can handle higher voltage and current compared to small transistor drivers, making it ideal for robotics and automation applications.
The module includes:
onboard 5V regulator
flyback protection diodes
heat sink
screw terminals for easy wiring
Perfect for beginners and heavy-duty motor control projects alike.
✨ Key Features
✅ Dual H-Bridge driver
✅ Control 2 DC motors or 1 stepper motor
✅ Up to 2A current per channel
✅ Wide motor voltage (up to 35V)
✅ Built-in 5V regulator
✅ PWM speed control
✅ Direction control
✅ Easy screw terminal connections
✅ Onboard heat sink
📊 Technical Specifications
🔌 Electrical
Parameter Value
Motor Supply Voltage (Vs) 5V – 35V
Logic Voltage 5V
Max Current (per channel) 2A peak (1–1.5A continuous recommended)
Power Dissipation High (requires heat sink)
Control Signal TTL compatible
⚙️ Driver IC
Parameter Value
Chip L298N
Type Dual H-Bridge
Channels 2
Output Type Push-pull
Switching PWM capable
📍 Pin Configuration (Pinout)
🔹 Power Section
Pin Description
+12V (Vs) Motor power input (5–35V)
GND Ground
5V Logic power output/input
👉 If motor supply > 7V → onboard 5V regulator works
👉 If < 7V → supply external 5V
🔹 Motor Outputs
Pin Description
OUT1 Motor A terminal 1
OUT2 Motor A terminal 2
OUT3 Motor B terminal 1
OUT4 Motor B terminal 2
🔹 Control Pins
Pin Type Function
ENA PWM Speed control Motor A
IN1 Digital Direction control A
IN2 Digital Direction control A
IN3 Digital Direction control B
IN4 Digital Direction control B
ENB PWM Speed control Motor B
🔌 Basic Wiring (Arduino Example)
🟢 Motor A
L298N Arduino
ENA PWM pin (D5)
IN1 D8
IN2 D9
🟢 Motor B
L298N Arduino
ENB PWM pin (D6)
IN3 D10
IN4 D11
🟢 Power
L298N Power
+12V Battery +
GND Battery – & Arduino GND
⚠️ Important: Always connect grounds together!
⚙️ How Control Works
🔹 Direction Logic
IN1 IN2 Motor A
0 0 Stop
1 0 Forward
0 1 Reverse
1 1 Brake
Same logic for IN3/IN4 (Motor B)
🔹 Speed Control
Use PWM:
analogWrite(ENA, 0–255);
Higher value → faster speed
📦 Applications
Perfect for:
🚗 Robot cars
🤖 Line followers
🦾 Robotic arms
🚪 Smart doors
🛞 DC gear motors
⚙️ Stepper motors
🏭 Small automation systems
⭐ Quick Summary
👉 Type: Dual H-Bridge Motor Driver
👉 Motors: 2 DC or 1 stepper
👉 Voltage: up to 35V
👉 Current: up to 2A/channel
👉 Control: PWM + Direction pins
💡 Pro Tips (from experience 😄)
⭐ Use external heatsink/fan for >1A loads
⭐ Don’t exceed 2A continuous
⭐ For higher efficiency → use L298N alternatives like BTS7960 or L293D or modern MOSFET drivers
⭐ Always use separate motor battery for noisy loads
No specifications available.
0.0
Based on 0 reviews
No reviews yet. Be the first to review this product!
Login to write a review.
Related Products
